指导教师:李野 张琪
参赛队员:宋建霖 梁洪铭 郭嘉翌 董鑫
获奖级别:国家级二等奖
本次作品是参加“2025年中国大学生工程实践与创新能力大赛”智能+赛道中救援赛道的作品。
以下是关于作品的简介。
本次比赛的核心任务围绕特定赛场展开,赛场为2400mm×2400mm 的正方形平面区域,区域内明确划分三大功能区:出发区、安全区与救援目标区。比赛前,双方队伍通过抽签确定各自需抓取的救援目标,随后需依据赛事规则,在规定时间内对场地中间的指定目标完成救援操作,整个过程需兼顾移动效率与目标抓取的准确性。
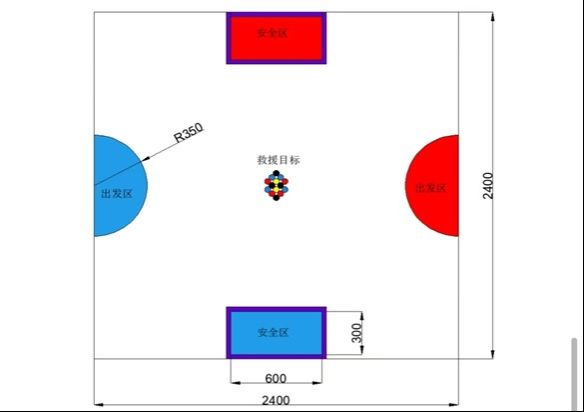
双方要根据赛前的抽签决定抓取救援的目标,之后根据规则对场地中间的目标进行救援
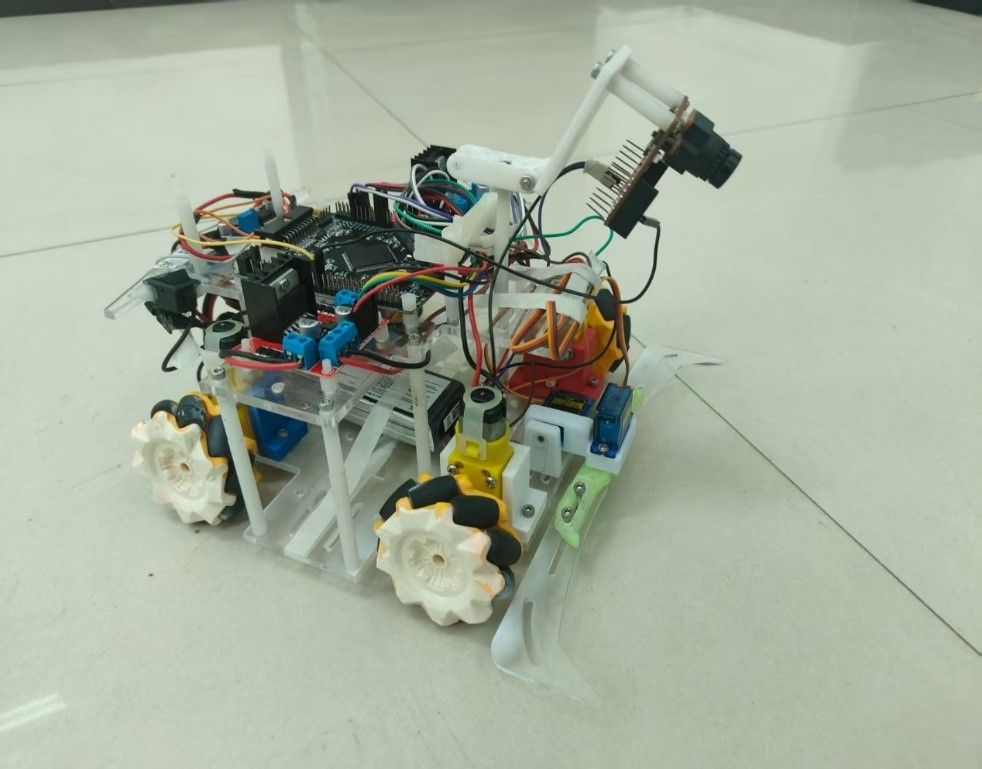
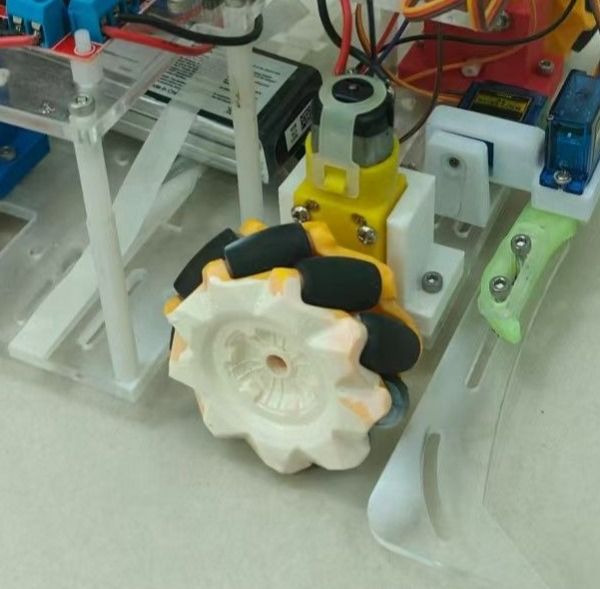
为实现赛场内顺畅、灵活的移动,作品采用四个TT 马达 + 四个麦克纳姆轮的驱动组合。麦克纳姆轮具备全方位移动特性,配合独立控制的 TT 马达,可让作品轻松完成前进、后退、侧移、旋转等动作,有效适应复杂赛场环境。
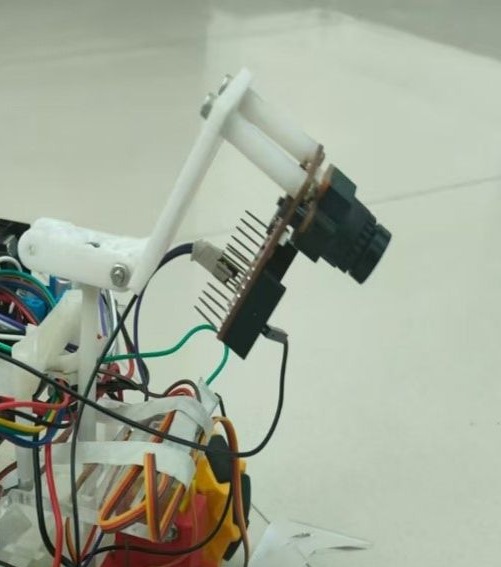
为准确锁定需救援的目标,作品在小车前方搭载OPMV 摄像头,通过摄像头实时采集赛场图像,核心实现两大功能:
颜色识别:基于赛前确定的救援目标颜色,精准区分目标与赛场其他元素;
距离检测:通过图像算法计算摄像头与目标的距离,为后续移动和抓取提供位置参考,确保小车与目标保持合适的相对位置。
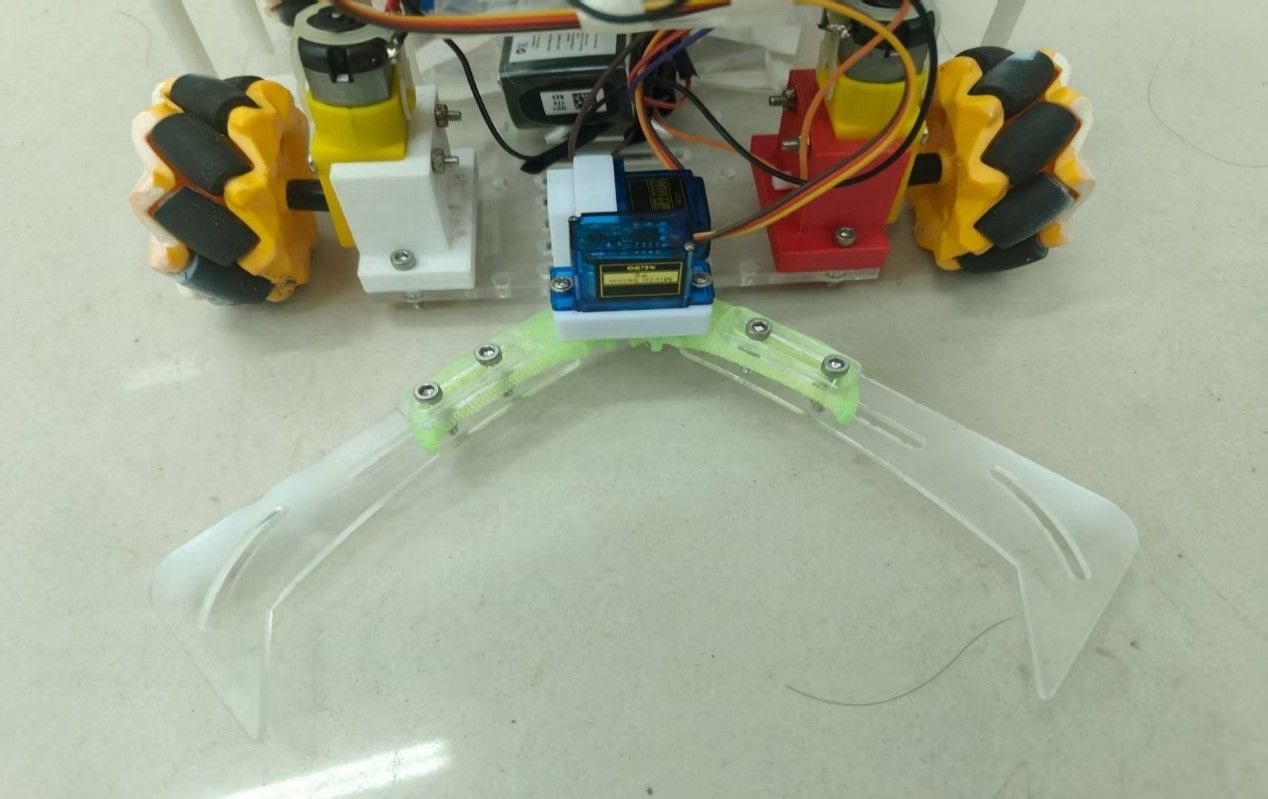
针对不同救援场景下的目标抓取需求,作品采用双 S90 小型舵机联动的抓取结构,分工明确:
舵机 1:负责核心抓取动作,通过舵机旋转驱动夹爪闭合,稳定夹持救援标;
舵机 2:承担角度调节功能,可带动舵机 1 及夹爪整体调整角度,灵活适配不同摆放姿态的救援目标,提升抓取成功率。
考虑到运输目标途中可能遇到的意外(如碰撞其他目标、被障碍物阻挡),作品在小车后方采用三角形结构。该结构可减少后方与其他物体的接触面积,降低被阻挡或卡滞的风险,保障小车后退、调整路线时的行进稳定性,避免因意外状况影响救援进度。
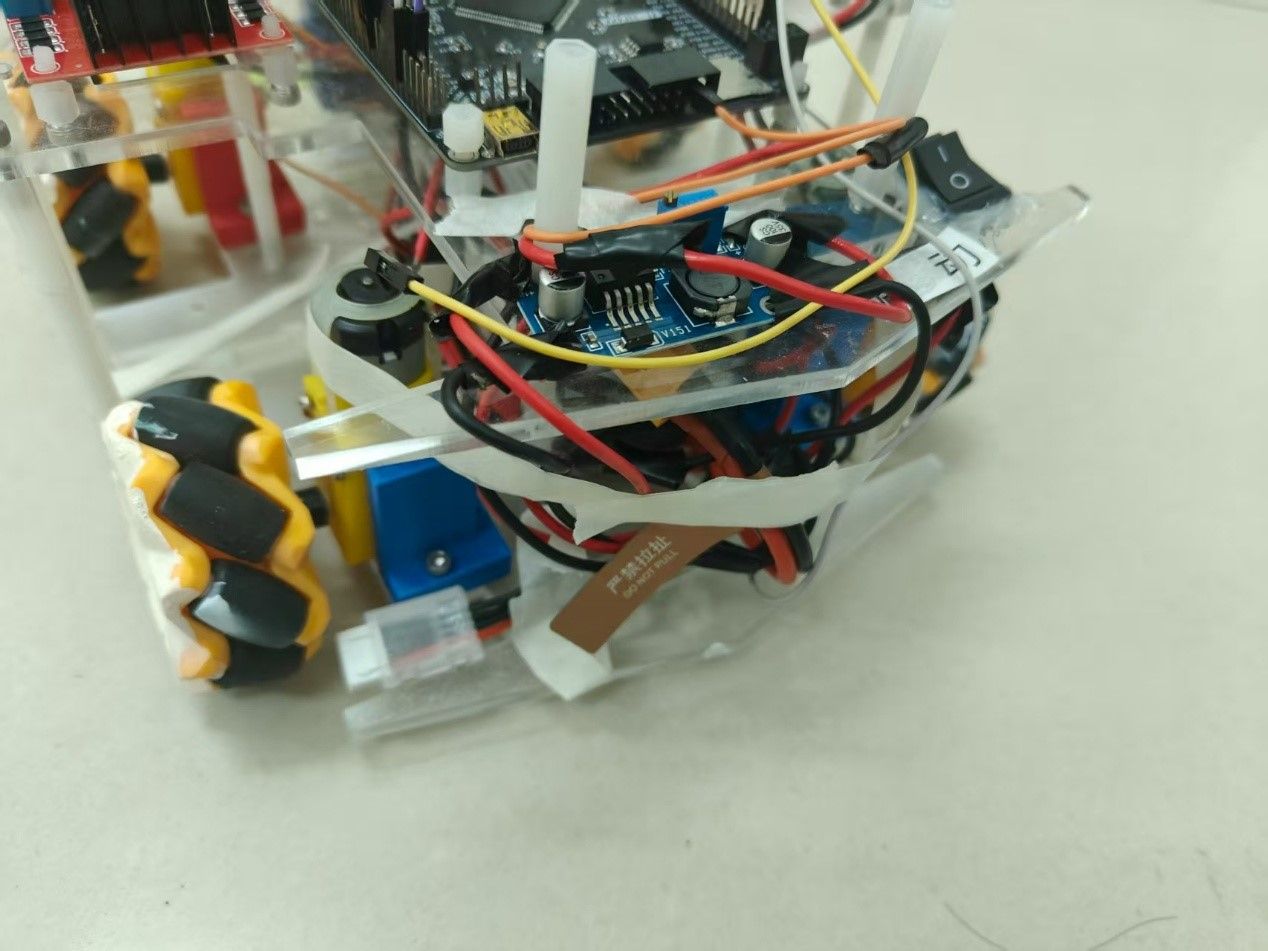
在小车的控制方面,我们采用stm32开发板和树莓派摄像头的联动对作品进行相互联动的控制,对救援目标进行救援树莓派摄像头负责图像采集与初步数据处理(如目标位置、距离),并将信息传输至 STM32 开发板;
STM32 开发板作为控制核心,接收数据后分析决策,驱动马达调整小车位置、控制舵机完成抓取动作,实现 “识别 - 决策 - 执行” 的全流程协同,确保救援操作精准高效。