指导教师:唐媛媛 苗宇
参赛队员:文俊雄 张龙坤 聂艺博 邹旭烨
获奖级别:国家级二等奖
核心配置与功能特点
本物流搬运机器人专为高效物料转运场景研发,以 STM32F11Hx 系列单片机作为核心控制单元,凭借该芯片出色的运算处理能力与外设兼容性,实现对机器人各功能模块的精准协同控制。
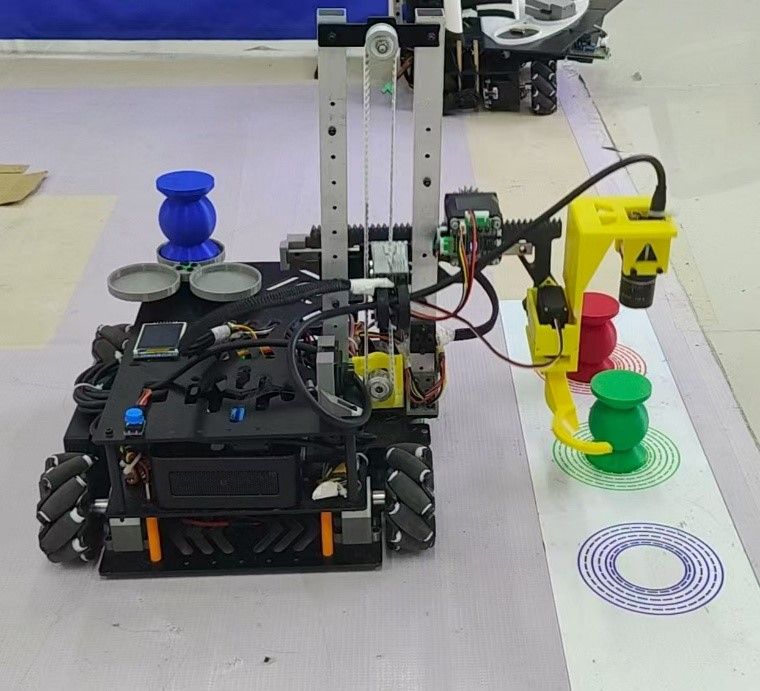
在机械结构设计上,机器人创新性采用可伸缩式升降台结构。该结构突破传统固定高度升降方式的限制,可根据不同功能区物料存放高度需求,灵活调整升降行程,既能适配低矮暂存区的物料取放,也能满足高层货架的堆叠作业,大幅提升了对多样化仓储环境的适应能力。
为确保运动控制的稳定性与精度,机器人搭载多级变 PID 串级闭环控制系统。该系统通过外层位置环实时采集机器人当前位置与目标位置的偏差,内层速度环动态调整电机转速,同时结合多级 PID 参数的智能切换机制,在机器人启动加速、匀速行驶、减速停靠等不同运动阶段,自动匹配最优控制参数,有效抑制了传统 PID 控制中易出现的超调、震荡问题,实现了物料在原料区、加工区、成品区等多区域间转运时的平稳运行与精准定位。